Webots User Guide <<
Previous Next >> CoppeliaSim
Getting Started with Webots
在我負責之部分第一項目首先講解到如何開始使用Webots的畫面與視窗,雖然這整本電子書都是在解說Webots介面使用,但在實際使用方面卻有所差別,以下為首要大略提到的標題及小標題的重點與補充說明。
章節一;開始操作Webots
目錄:
 介紹Webots
介紹Webots
原文重點:
1-It offers a rapid prototyping environment, that allows the user to create 3D virtual worlds with physics properties such as mass, joints, friction coefficients, etc.
2-The user can add simple passive objects or active objects called mobile robots. These robots can have different locomotion schemes (wheeled robots, ,legged robots, or flying robots).
3-Webots is well suited for research and educational projects related to mobile robotics.
4-even if you don't know these languages, you can still program the e-puck and Hemisson robots using a simple graphical programming language called
5-If you don't want to use existing robot models provided within Webots and would like to create your own robot models, or add special objects in the simulated environments, you will need a basic knowledge of 3D computer graphics and VRML97 description language.
6- A world file doesn't contain the controller code of the robots; it only specifies the name of the controller that is required for each robot.
7-it can execute operations that can normally only be carried out by a human operator and not by a real robot.
中文概略解說:
提供模擬環境,使用戶可創建物理特性(質量、摩擦係數等等)的3D虛擬世界,可添加各種不同輪型、飛行等機器人在景象中,且配備感測器、執行設備等(攝像機、馬達、接收器等),也可對機器人做單獨編程。
包含大量機械人模型與程式控制器範例包(可將程式轉移到e-puck,DARwIn-OP等真實機器人),以幫助用戶熟Webots 。
Webots在機器人技術上有一定程度的依靠,例如:移動機器人原型製作、多主體研究、教授機器人技術、機器人競賽等等涉略範圍。
即使不知道python、c++、java等程式編碼的知識,依然可以使用BotStudio程式編碼器對機器人編輯。
如果不喜歡模組中原有的機器人範例包,也可另外使用3D、VRML97描述語言的程式來創建模型並導入。
Webots模擬組成條件:
1-.wbt副檔名,定義多個既器人與環境,取決於外部(proto),檔案儲存在每個Webots項目裡worlds子目錄中。
2-在c++可進行修改可選之物理插件。
3-機器人都由程式控制程序組成(python、c++、java)。
4-對於環境中物件之方向、位置、形狀、顏色、亮度會仔細編輯。
5-關節本身包含一個攝像頭,但World文件不包含機器人控制器代碼,只有指定每個機器人所需控制器名稱。
管理者可執行是因為操作者正在執行的關係,並不是由機器人執行操作,適合任何編碼語言,但與常規控制器來說管理者將有權使用特權操作(包含模擬控制)。
開始Webots之操作
主軸:主要為解說命令式與操作系統步驟
中文解說:
1-Linux=執行Webots需輸入Webots指令
2-macOS=打開軟件包的目錄,點開Webots圖標
3-Windows=點選開始->程序文件/ Cyberbotics,並點擊Webots R2020a版本2之]圖標。
也可以通過鍵入webots.bat從DOS控制台(cmd.exe)啟動Webots。
僅從C:\ Program Files \ Webots \ msys64 \ mingw64 \ bin目錄執行(假設Webots已安裝在C:\ Program Files中),此命令才有效。
如果將上述目錄添加到Path環境變量中,也可以從任何目錄工作。
補充:直接從DOS控制台調用webots.exe可能無法工作,因為某些設置可能會丟失(請參閱webots.bat的內容)。
4-Command Line Arguments(命令行參數)=從Linux 或 Mac或命令提示符(Windows)啟動Webots時,可以使用以下命令行選項:
Usage: webots [options] [worldfile]
Options:
--help
Display this help message and exit.
--version
Display version information and exit.
--sysinfo
Display information about the system and exit.
--mode=<mode>
Choose the startup mode, overriding application preferences. The <mode>
argument must be either pause, realtime, run or fast.
--fullscreen
Start Webots in fullscreen.
--minimize
Minimize the Webots window on startup.
--batch
Prevent Webots from creating blocking pop-up windows.
--stdout
Redirect the stdout of the controllers to the terminal.
--stderr
Redirect the stderr of the controllers to the terminal.
--stream[="key[=value];..."]
Start the Webots streaming server. Parameters may be
given as an option:
port=1234 - Start the streaming server on port 1234.
monitorActivity - Print a dot '.' on stdout every 5 seconds.
disableTextStreams - Disable the streaming of stdout and stderr.
--log-performance=<file>[,<steps>]
Measure the performance of Webots and log it in the file specified in the
<file> argument. The optional <steps> argument is an integer value that
specifies how many steps are logged. If the --sysinfo option is used, the
system information is prepended into the log file.
Please report any bug to http://www.cyberbotics.com/bug
選擇worldfile參數指定要打開的.wbt文件的名稱。
如果未指定,則Webots嘗試打開最近打開的文件。
--minimize選項用於在啟動時最小化(圖標化)Webots窗口。
將跳過啟動屏幕和最終的“歡迎對話框”。
從選項中自動啟動Webot時,可以使用此選項來避免窗口混亂。
補充:當指定--minimize時,Webots自動使用快速模式。
--mode = <mode>選項可用於以指定的模擬模式啟動Webot。
四種可能的模擬模式是:暫停,實時,運行和快速。
對應於Webots圖形用戶界面的模擬控制按鈕。將覆蓋但不修改Webots首選項中保存的啟動模式。
例如:鍵入webots --mode = pause filename.wbt以暫停模式啟動Webots。
--sysinfo選項會顯示有關當前系統的雜項信息,並退出Webots。
--stdout和--stderr選項具有將Webots控制台輸出重定向到調用終端或進程的作用。
例如:1-這可用於將控制器輸出重定向到文件或將其通過管道傳遞給Shell命令。
2---stdout重定向控制器的stdout流,而--stderr重定向stderr流。
補充:stderr流還可能包含Webots錯誤或警告消息。
--stream選項啟動Webots流服務器。
可以選擇更改流服務器的默認參數。
此選項是一個字符串,其中包含參數鍵及其值的列表,並用分號分隔。
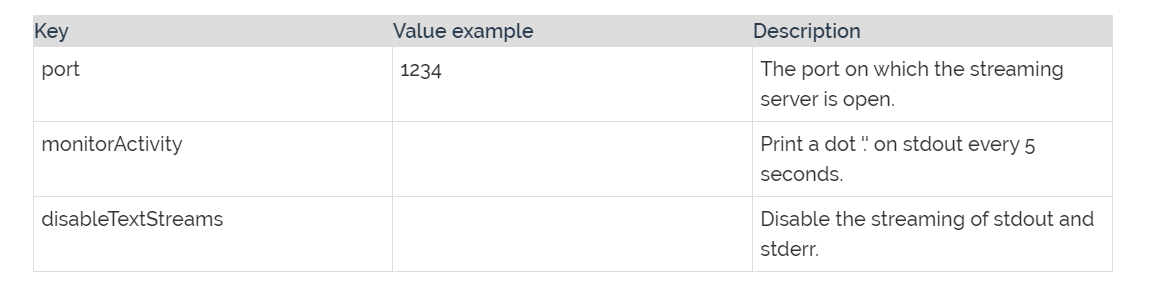
(上圖表描述受支持的選項。)
5-Safe Mode(安全模式)=Webots可能無法啟動,因為阻止導致Webots或OpenGL崩潰的世界上。
在這種情況下,可以在安全模式下啟動Webots。
安全模式迫使Webots從一個空白的世界開始,減少所有OpenGL選項並存儲這些首選項。
因此只需在運行Webots的環境中設置環境變量WEBOTS_SAFE_MODE。
以這種方式成功啟動後,必須取消設置此環境變量,再次打開世界並增加OpenGL首選項。
補充:此操作可能會導致新的崩潰。
on Windows(Windows操作):打開環境變量系統對話框。
在Windows開始菜單的搜索欄中查找“環境變量”,點擊“編輯系統環境變量”,開啟“系統屬性”對話框,進入“高級”選項卡。
點擊底部的環境變量按鈕。
添加新的WEBOTS_SAFE_MODE用戶環境變量。
用戶變量面板中,點擊“新建”按鈕,添加名為WEBOTS_SAFE_MODE的新用戶變量,其值為true。
之後照常啟動Webots。
On Linux and macOS:輸入以下兩行指令碼
export WEBOTS_SAFE_MODE=true
webots
即可開啟Webots。
使用者介面
3D視窗
情景樹
優先選項
Webots傳訊
電腦設備
Webots User Guide <<
Previous Next >> CoppeliaSim